Robots Working Where Humans Should Not
IRC for Intelligent Manufacturing and Robotics
Research team:
Dr. Samir Mekid
Established to respond to concrete industry problems, the Interdisciplinary Research Center for Intelligent Manufacturing and Robotics (IRC-IMR) at KFUPM has been pursuing projects structured around operational requirements rather than purely academic output. As described by Prof. Samir Mekid, the former center’s director and Principal Investigator for several such projects, this approach guided early engagement with industry partners, including Saudi Aramco and AFI Robotics, unveiling several existing challenges. One of those centered around cleaning and inspecting hydrocarbon tanks and vessels.
These structures include oil, gas, and water separation units that are opened only once every five to seven years for maintenance. Many of the tanks measure up to 40 meters in length and between 30 and 35 meters in diameter, while vessels reach up to 50 meters in length and 4 meters diameter with access restricted to two openings of roughly 65 centimeters each. Under current practices, cleaning these vessels requires around 20 workers operating for nine days in confined, high-risk conditions. The work takes place in environments where flammable atmospheres risk is present. Risks include suffocation, metal-to-metal contact that may generate sparks, and exposure to toxic gases such as hydrogen sulfide, requiring continuous monitoring through shoulder-mounted sensors.
The IRC-IMR team set out to eliminate the need for human entry by developing industrial robots with capabilities close to those of human workers and more automated. Existing solutions were assessed through a global benchmarking exercise across the United States, Europe, the UAE, and Australia, supported by direct discussions with company executives. Most local inspection services did not address tanks of this scale, and smaller vessels were typically serviced using foreign-manufactured robots, revealing a gap for a locally developed system.
Interest from Saudi Aramco coincided with outreach from AFI Robotics, which owned an outdated inspection robot that no longer met industry requirements. AFI proposed a joint venture, which the IRC-IMR accepted. This resulted in two parallel development tracks. One focused on upgrading AFI’s existing robot through a one-and-a-half-year collaboration, forming a dedicated R&D team and using existing market technology as a shortcut to commercialization. This reduced development time by improving proven systems rather than starting from zero.
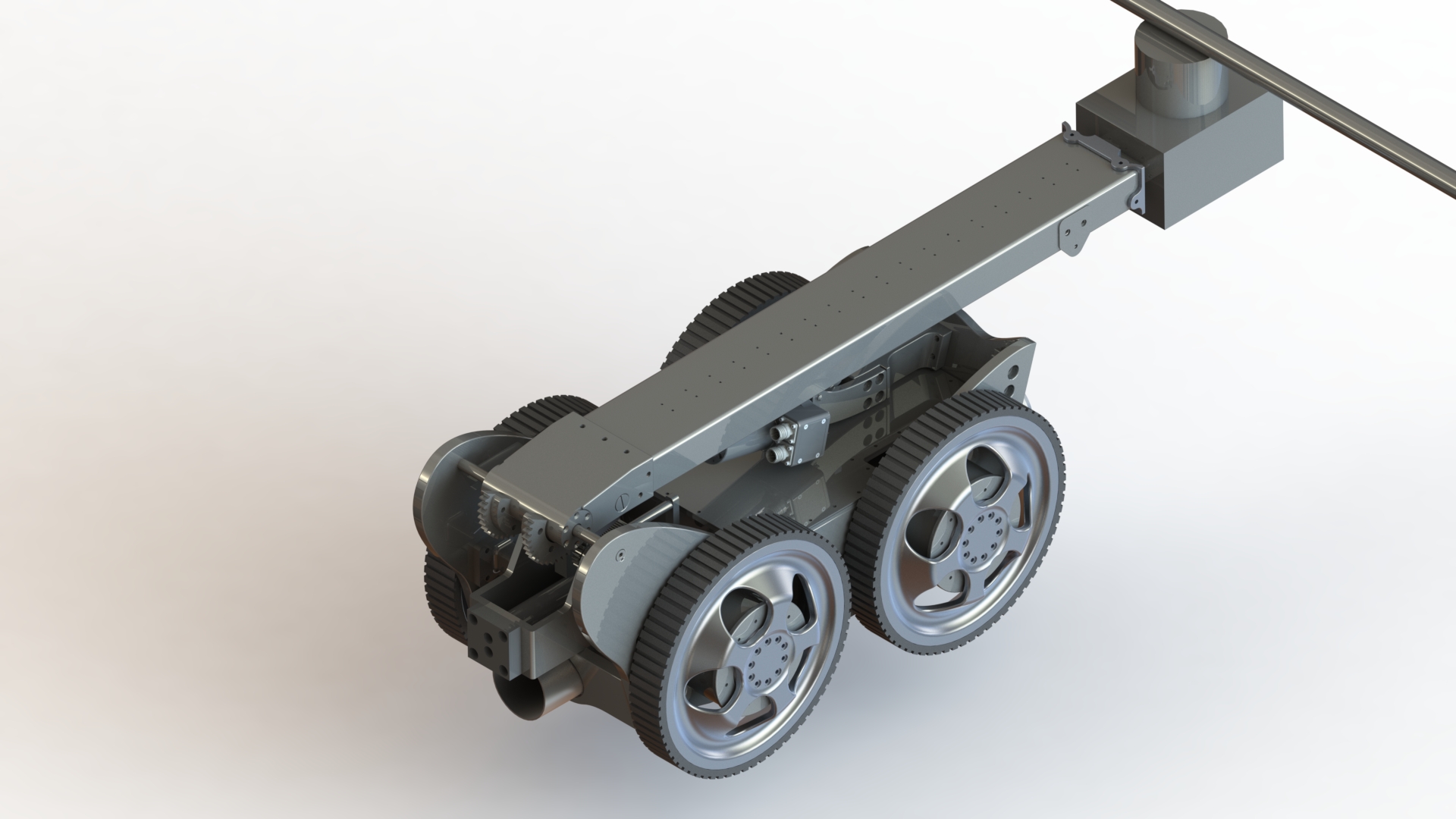
In parallel, the team continued working on a separate solution for Saudi Aramco. This effort targeted a fully autonomous robot capable of both cleaning and inspection inside large vessels. Unlike the AFI robot, which performs inspection only, the Saudi Aramco robot is a fully functional unmanned ground vehicle (UGV) designed to move inside large vessels, up to 50 meters tall, and clean hard-to-reach areas. It is currently designed for routine, dull, dirty, and dangerous tasks. The UGV is positioned inside the vessel before operators exit the area and carries cameras mounted at the front, back, and top, transmitting visual data to operators outside through a custom pendant interface. A robotic arm placed on top supports a rotating jetter that sprays high-pressure hot water or chemical mixtures toward the walls.
Upon entry, the robot photographs the entire interior to assess conditions, plan routes, and avoid obstacles. Its navigation system accounts for sludge residues a few centimeters deep that affect balance and movement. The platform relies on powerful customized motors, with most of its components being purpose-built rather than off-the-shelf.
Inspection data is processed and mapped in real time, with live video and data transmission enabling remote decision-making. The robotic system was tested in local hydrocarbon tanks, to assess performance and identify improvements, and will later be tested in real environments.
This robotics development is also part of a system operation, alongside unmanned aerial vehicles (UAV) and external robots, allowing for thorough inspection reporting of all types of vessels. Artificial intelligence can be applied to inspection data to distinguish actual defects from false positives, assess corrosion levels, and allow robots to adapt to unexpected internal changes.
The research contract with Saudi Aramco spanned two and a half years and has now been completed, with the robot ready for validation in operational plants. One patent has been granted for conceptual design, and a second is pending for the physical validated prototype. Proof of concept based on the first patent was exhibited at the 50th International Exhibition of Inventions - Geneva in 2025, where it received a silver medal for its effectiveness and market focus.
As online robotic inspection becomes an industry expectation rather than an exception, the KFUPM-developed system positions local expertise at the center of a high-risk, high-value sector. “This is a multi-million-dollar industry worldwide. We made it our calling to create a revolution of the hazardous industrial maintenance sector and how it performs its operations. Through the introduction of intelligent robot systems, we can safely clean and inspect confined, risky environments,” Prof. Mekid remarked. While its immediate application serves the oil and gas sector, the underlying capabilities allow extension into security, environmental monitoring, and exploration in extreme conditions, marking a practical transition toward safer, technology-driven industry practices.
United Nations SDGs
Through our commitment to sustainable development, this project aligns with the following United Nations Sustainable Development Goals (SDGs):

Climate Action

Industry, Innovation, and Infrastructure

Clean Water and Sanitation